工业机器人运维实验教学项目
随着社会经济的高速发展和人口老龄化趋势的加剧,企业生产人工成本不断增加,尤其是制造业。而工业机器人具有效率高、稳定性高、成本低等优势,各大企业纷纷以机器人换人,大量引入工业机器人。机器人在企业的大量应用,使得具备机器人领域综合素质的高级技能型人才紧缺,难以满足机器人行业发展的需求。然而大型工业机器人占地面积大,设备成本过高,在实际教学过程中也存在着安全性方面的隐患,使得学校很难开展大型工业机器人的维护保养课程。因此河南工程学院推出了“工业机器人运维实验教学”课程,以满足机械工程专业实践教学相关需求。
实验目的:
依托VR虚拟现实、多媒体、人机交互等技术,改革教学模式,构建高度仿真的虚拟实验环境和实验对象。工业机器人运维虚拟仿真实验教学,不仅能避免真实机器人操作所带来的各种危险, 还能打破时空限制,实时、实地为学生提供虚拟仿真的实验条件,让学生在虚拟环境中开展实验,弥补真实设备的不足,提高实验效果。该实验可使学生了解并掌握工业机器人测试、维护、保养、操作的技术和方法, 完成虚拟实验后再进行实物实验,在提高实验效果的同时,也降低了实验成本,加强了学生的安全保障。
使用VR三维虚拟仿真技术,解决了专业实验教学过程中设备昂贵、场景缺乏、学习过程危险等问题,并通过体感互动数据的记录,完成实验过程的量化考核。
实验内容:
工业机器人运维虚拟仿真实验项目的教学目的是:使学生掌握工业机器人测试、维护、保养和操作的技术和方法。主要内容如下:
一、两大高新技术融合,具有前沿性
融合两大高新技术,立于产教前沿。机器人技术和虚拟现实技术是“中国制造2025”战略实施的核心技术支撑,也是智能制造的重要发展基石,工业机器人虚拟实验教学项目融合机器人与虚拟现实两大高新技术,立于该领域的产教前沿,推动产学研一体化。
二、基础与能力并重,知识与兴趣并举
基本实验和附加开放实验相结合,不仅注重基础技能的培养,还加强了能力与兴趣的开发。基本实验满足教学,附加开放实验拓展知识,对虚拟现实技术感兴趣的学生,可申请参与实验室的开放项目,参与机器人数字化、工艺规划及系统开发项目,拓展学生工程实践能力,培育创新创业新思维。
三、身临其境,自然交互
采用虚拟现实技术,搭建高度仿真的数字实验平台,最大限度地接近真实环境;系统操作如同身临其境,沉浸性强,自然交互;实验不受时空限制,可以随时随地开展;隔绝外界干扰,学生心无旁骛,专注于学习。
学生以第一视角和交互模式进行工业机器人教学和实训,可选择正确的实验设备、控制手柄抓取正确的物体等,都能触发相应的运行效果。学生在虚拟环境中,犹如身临其境,掌握工业机器人测试、维护、保养和操作的技术和方法。
实验采用基本分加附加分、虚实结合的考核方法。基本分100分,其中理论教学占10%,虚拟实验占50%,现场实物实验占40%。附加分为开放实验评分,满分20分。
理论教学(10分):在线答题,考核合格后,允许进行后续实验。
虚拟实训(40分):系统自动记录学生操作过程,输出操作报告,教师根据操作报告评分,合格后方可进行后续实验。
实物实训(50分):教师根据学生实物操作现场表现,给出评分。
开放实验(20分):学生参与虚拟现实实验室的开放项目,根据学生参与程度和完成结果评出附加分。
最终实验考核:综合评分60分以上并撰写实验报告,成绩认定为合格。
老师先对学生进行工业机器人测试、维护、保养、操作技术的理论讲授。理论教学采用多媒体教学方式,以3D激光投影仪+3D眼睛为主要讲解设备,以PPT+3D视频的方式为主,教师提问学生回答的形式为辅进行教学。考核方式为在线答题,计算机自动评分,此项分数占总分数的10%。
首先教师使用绿幕系统与虚拟现实设备,为学生讲解虚拟仿真系统的使用方法,示范虚拟现实实验的操作过程及注意事项。然后三个学生为一组进行虚拟实验,一个学生虚拟操作,一个学生防护,一个学生操作计算机,小组内轮流进行。
学生使用工业机器人运维实验系统,进入虚拟车间环境,以第一视角体验、交互模式进行工业机器人运行维护实验。实验过程中,学生选择正确的实验设备、使用手柄抓取正确的实验材料等,都能触发相应的运行效果。并且系统将对学生的操作流程(如是否按照实验步骤操作、是否符合操作规范)、时间等进行评价。该综合性的评价能够为学生提供针对性的反馈,为教师提供学生的学习数据,此项分数占总分数的50%。
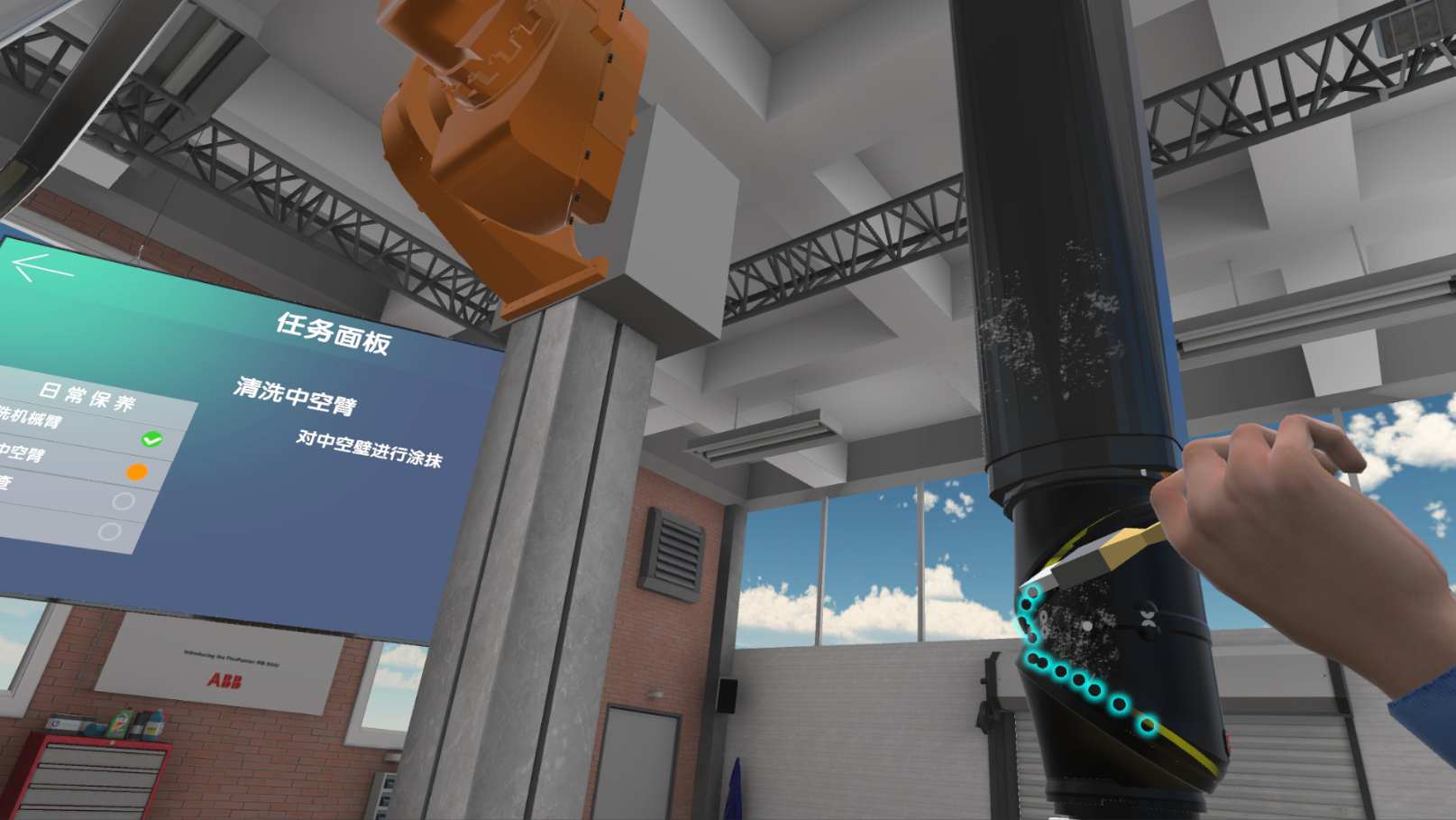
举例说明:在清洗中空臂的环节中,用户需要通过VIVE手柄侧握键,选择无绒布(避免产生静电,选择错误会扣除分数),然后在规定的时间内,通过晃动手柄模拟擦拭的动作,对机械臂身上四个点位进行清洗(若未能在规定时间内完成也会扣除相应的分数)。
学生在指定的时间内通过虚拟仿真系统考核合格后,可在线申请实物操作,老师可以依据系统提供的虚拟实验考核成绩,对学生进行筛选,使已掌握相关技能的学生优先进行实物实验,有利于阶段化的学习,此项分数占总分数的40%。

这一项为附加项,完成基本实验后,希望继续深入学习和参与虚拟仿真实验室建设的学生,可以申请参加实验室的开放项目。学生经考核合格后,在教师带领下,可参与机器人数字化、工艺规划及系统开发等实际项目。根据学生参与程度和完成结果评出附加分,最高20分。
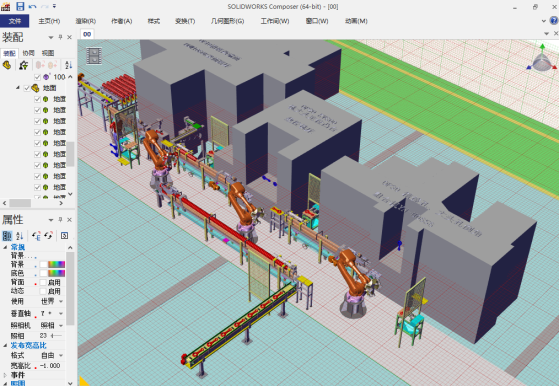
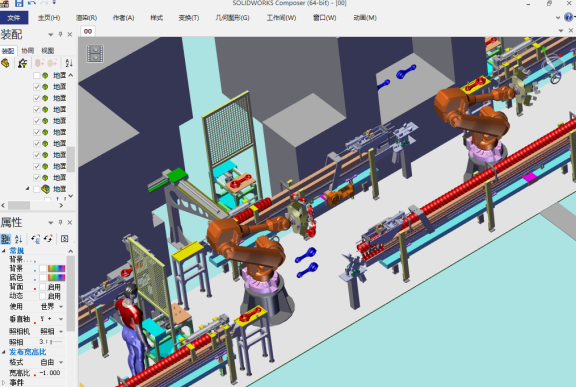
学生参与无锡普华信息技术有限公司连杆智能生产线项目,在老师带领下进行机器人数字化、工艺规划及系统开发。
学生参与兆阳创新科技(深圳)有限公司的喷涂VR数字化生产线项目,在老师带领下完成了喷涂机器人的工艺规划与设计。
模块一:示教器使用模块
示教器使用模块:工业机器人的操作离不开示教器,在进行维护保养的过程中将大量使用示教器进行机器人位置的调整,改模块在VR场景中1:1还原实际机器人示教器,学生通过触屏以及摇杆的操作完成机器人各轴的角度调整。

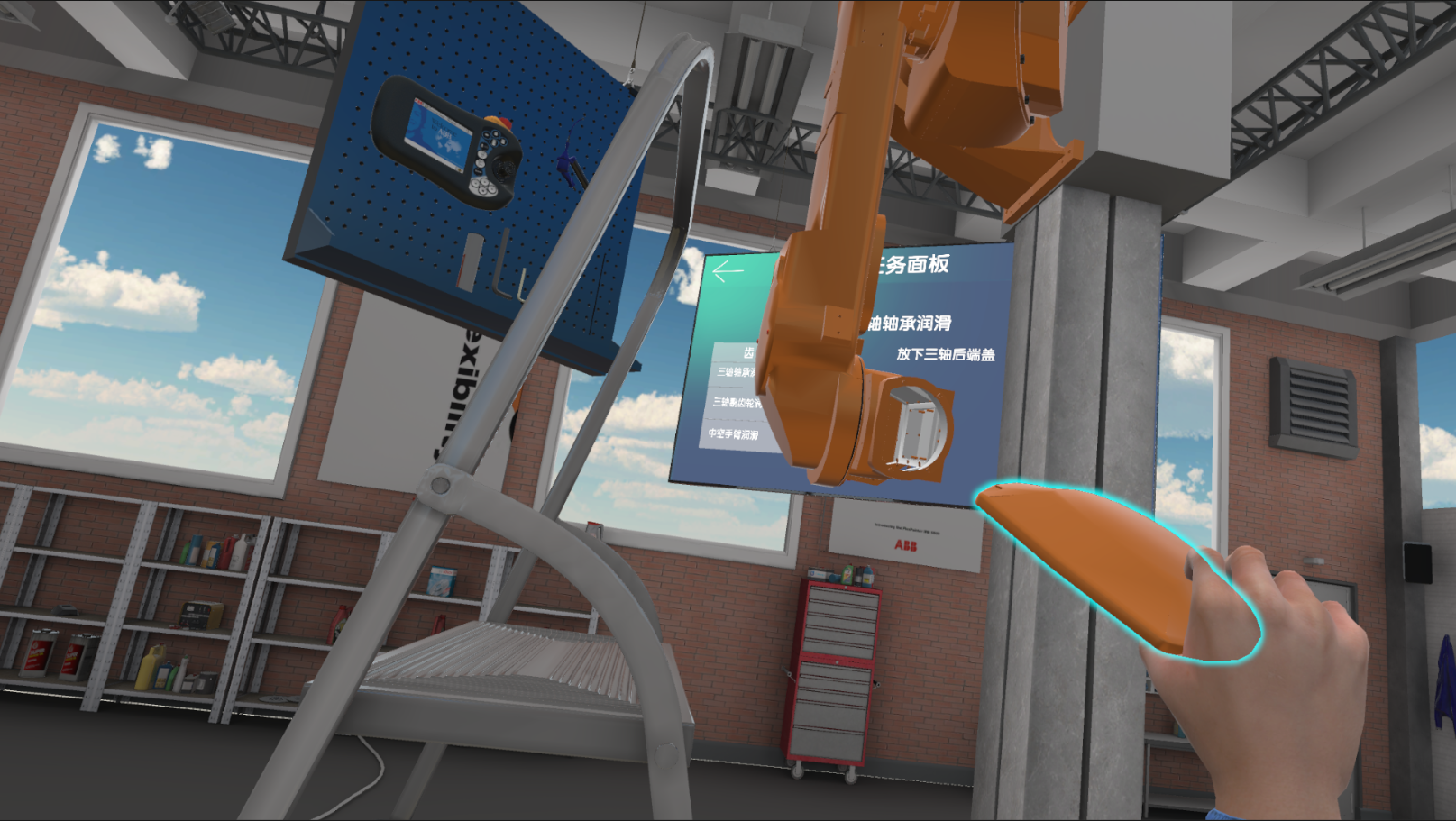
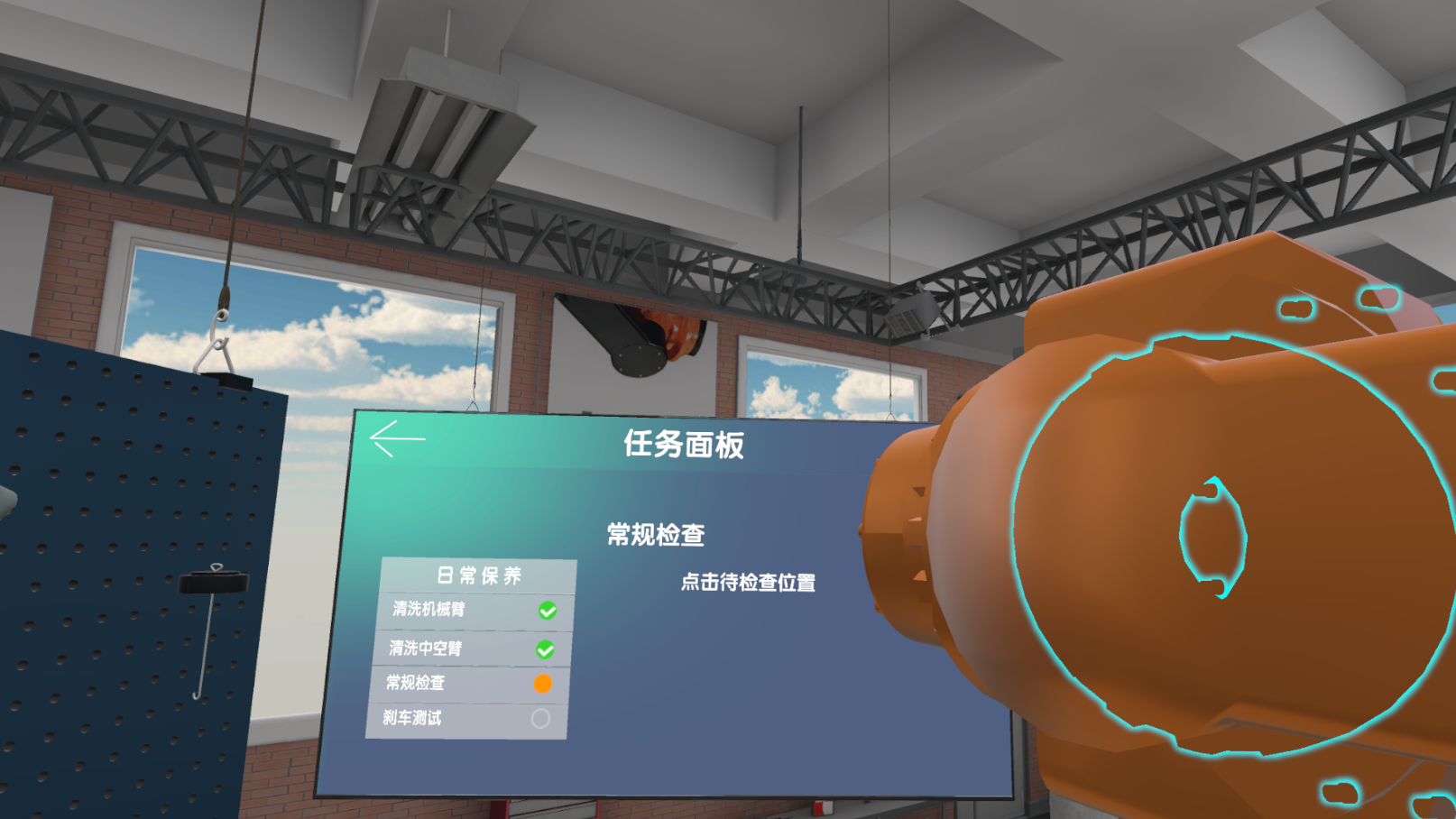
模块二:日常保养模块
日常保养模块:工业机器人日常保养模块充分还原设备日常保养操作流程,保养内容包括机械臂日常清洗、中空臂日常清洗、漏油检查、螺丝预紧力检查、齿轮异响检查以及刹车测试。如在机械臂中空臂的清洗任务中,学生需使用正确的清洗工具,并在机械关节处完成涂抹油脂等精细操作。

模块三:传动系统保养
传动系统保养模块:仿真任务包括二轴齿轮、三轴齿轮以及中空臂齿轮,保养过程中,学生需完成机器人位置调整,盖板拆卸,润滑油加注,机器人零位设置。

模块四:齿轮箱油位检查模块
齿轮箱油位检查模块:工业机器人齿轮箱中的机油在长时间的运转后容易损耗从而造成齿轮箱异响加速齿轮磨损,在本模块中,学生需完成机器人各轴的齿轮箱油位检查,并完成各轴齿轮箱的机油加注。
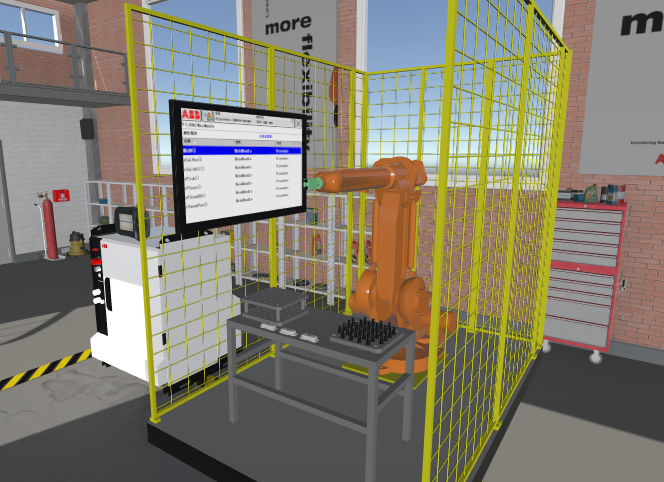
模块五:火花塞搬运模块
火花塞搬运模块:在此模块下,学生通过提示信息,完成对机器人系统的初始化调试,学生通过使用虚拟车间中的ABB工业机器人示教器,完成一系列调试任务,调试过程与实际调试内容一致。调试步骤如下:程序导入工件、坐标系标定工具、坐标系标定、点位示教、启动工作站。
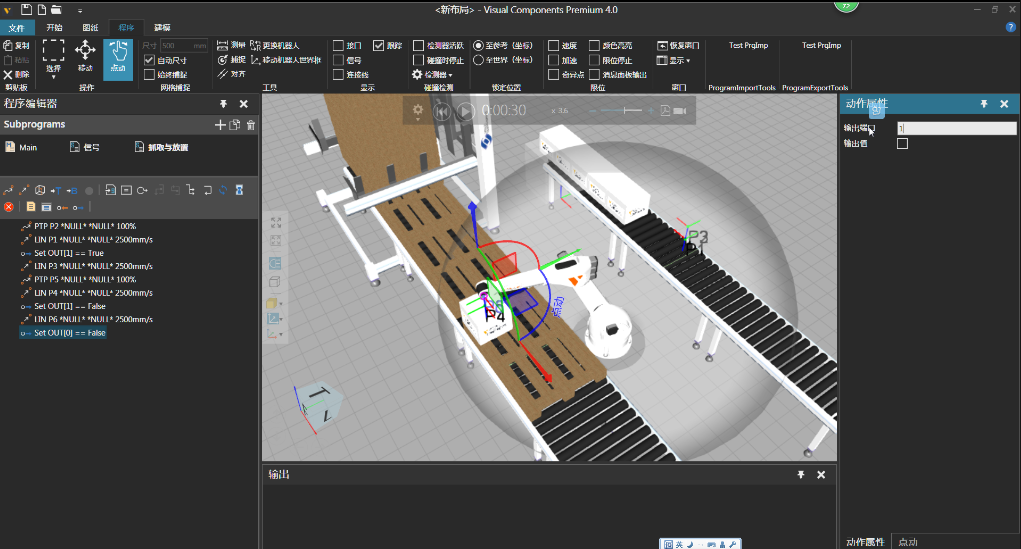
模块六:工业机器人轨迹规划模块
工业机器人轨迹规划模块:工业业生产中为了使机器人运动轨迹连续、平滑,或效率最优、时间最少等,可以对机器人进行轨迹规划,并在本实验教学系统中仿真,形象显示规划结果,避免由于轨迹规划错误等原因而直接实物操作出现的损失。在本模块中,学生可以先进行轨迹规划,再在本系统中仿真,验证算法。
校内学生入口
| 时间 | 可实验人数 | 可报名人数 | 状态 | 报名 |
|---|---|---|---|---|
重庆职院学生入口:
| 时间 | 可实验人数 | 可报名人数 | 状态 | 报名 |
|---|---|---|---|---|
校外学生入口:
对校外学生开放资源下载,但需与管理员联系,获得资源下载用户名与密码。 管理员:刘军老师 电话:18638710893 邮箱:992163435@qq.com
操作系统:Windows10(64-bit versions)
CPU:IntelCorei7-6700K或者AMDRyzen51600X以及更高级别
GPU:NvidiaGeForceGTX1060ti或AMDRXVega64以及更高级别
内存:16GB
硬盘:128GSSD+500G机械硬盘
电源:600W
外接设备:HTC Vive